お習字ロボにひずみゲージセンサを搭載することを検討。
今まで、お習字ロボはオープンループ制御だってので、わずかなセッティングの狂いや重力によるアームのたわみで字の太さが一定しないという問題があった。そこでひずみゲージを使用して筆圧をフィードバックすることを検討する。
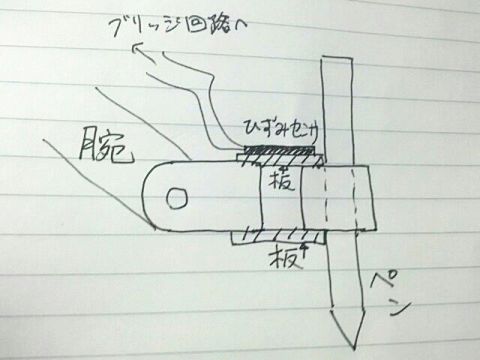
使用するひずみゲージは日本橋のシリコンハウスで入手した共和電業のKFG-5-350-C1-23-L1M2R。約350Ωの抵抗値があり、これがひずみによってわずかに変化する。ほんとうにわずかな変化であり、指でグニャっと曲げても351Ωが350Ωに変化する程度である。このわずかな変化をゼロ近傍の電位差に変換して差動増幅するためにホイートストンブリッジを組む。差動増幅には計装アンプを使用する。試しに秋月電子で売ってるINA128を使用してみる。
【回路図】
http://licheng.sakura.ne.jp/roboarm/hizumi.pdf
http://licheng.sakura.ne.jp/roboarm/hizumi.CE3 (BSchデータ)
http://licheng.sakura.ne.jp/roboarm/IC.LB3 (BSchライブラリ)
実験結果はまた来年。
それでは、良いお年を。m(_ _)m