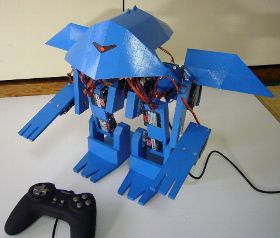
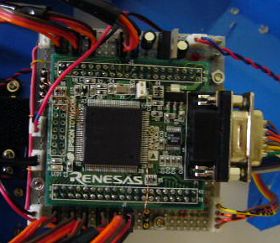
2006-08-03 二足歩行ロボット「はーい、コックです」 ロボット製作 二足歩行ロボット「はーい、コックです」の機体、回路、電装系がようやく完成。 機体のベースは共立のウィアード・セブン。上半身は独自設計。 CPUはインターフェース6月号の付録のSH-2マイコン。 しかし、ロボゴング4まで、あと3日しか作業時間がない。まだソフトウェア白紙なのに! ゲームパッドのドライバはおろか、歩行プログラムすら書いてない。ああ、どうしよう。