連続回転サーボについて
ラジコンサーボは、今や電子工作の定番パーツです。ドライバ回路不要で、パルス幅だけで角度制御ができちゃう便利なモータです。しかも安いものなら1000円程度で手に入ります。
しかし、ラジコンサーボはあくまで操舵などの角度制御のためのモータであるため、車輪のような連続回転はできません。そこで、ラジコンサーボに改造を施して、連続回転を可能とし、角度制御の代わりに回転方向と速度を制御できるようにします。
ちなみに、最初から連続回転できるサーボとして市販されているものもあります。
【例】 共立エレショップ - ロボット用サーボモーター S35 STD
改造手順の概要
改造の手順は以下の3ステップです。
まずはラジコンサーボの底面のネジをはずしてギアボックスのフタをあけます。後でギアの組み立てが分からなくなると面倒なので、最初にギアボックスの写真を撮っておくとよいでしょう。
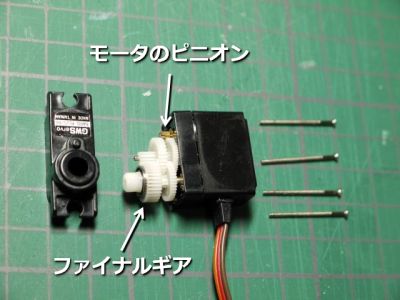
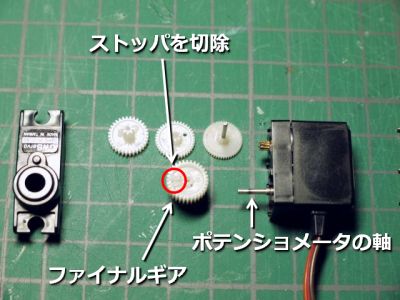
(1) ファイナルギアのストッパを切除
ラジコンサーボのファイナルギアには、機械的なストッパが設けられています。これは、本来の可動範囲を超えて出力軸を回転させないための安全装置です。
ストッパがあると連続回転できませんから、これを切除します。ファイナルギアの円盤面を見ると突起があります。これがストッパです。安価なラジコンサーボではファイナルギアは樹脂成型部品ですから、ニッパかナイフで切り取ればOKです。製品によって機構が異なるのでケースバイケースで加工します。ストッパがそもそも設けられていない製品もあるようです。その場合は、この工程は不要です。
(2) ファイナルギアとポテンショメータの連動を解除
ラジコンサーボには角度制御のためのフィードバック制御回路が内蔵されています。ファイナルギアと連動するポテンショメータによって、現在角度のフィードバック信号を得ています。制御パルス(の積分値)とフィードバック信号とを比較して、所望の角度までファイナルギアを回転させて静止するようになっているのです。
連続回転のためには、ファイナルギアとポテンショメータの連動をなくし、常に一定のフィードバック信号となるようにします。ファイナルギアとポテンショメータは同軸で連動しています。ファイナルギアがポテンショメータの軸に圧入されている場合、ファイナルギアの穴をドリルでわずかに広げるか、軸を研磨してわずかに細くします。これにより ファイナルギアがポテンショメータに対して空転自在になります。今回は1.4mmのドリルで穴を広げました。製品によって機構が異なるのでケースバイケースで加工します。

(3) ポテンショメータをニュートラル位置に調整して固定
ニュートラルの制御パルスを入力したときにちょうどモータが停止するようにポテンショメータを調整します。ニュートラルのパルス幅は製品によって異なりますが、概ね1500usec前後です。
【参考】 RCサーボの制御パルス幅とArduinoのServoクラス
マイコンでニュートラルの制御パルスを発生させて、ラジコンサーボに入力します。するとモータが回転するでしょう。ポテンショメータの軸をつまんで回すと、ある位置でモータの回転が止まります。そこがニュートラル位置です。
ポテンショメータをニュートラル位置に調整できたら、回らないように固定します。瞬間接着剤を流し込んでもいいですが、合成ゴム系接着剤かネジ止め剤などで固めるほうが無難です。接着剤が乾いたらギアボックスを組み立て直してフタをします。以上で完成です。

制御方法
ニュートラルの制御パルスを入力するとモータは停止します。ニュートラルを中心に、パルス幅を短くするとモータはCCW方向に連続回転します。また、パルス幅を長くするとモータはCW方向に連続回転します。このとき、パルス幅に応じて回転速度が変化します。
車輪の取り付け
ラジコンサーボの出力軸はホーン取り付け用のギザギザ軸です。車輪として使いたい場合は、ホーンに車輪を取り付けるしかありません。車輪が偏芯しているとガタガタするので、なるべく偏芯しないように注意して固定します。
