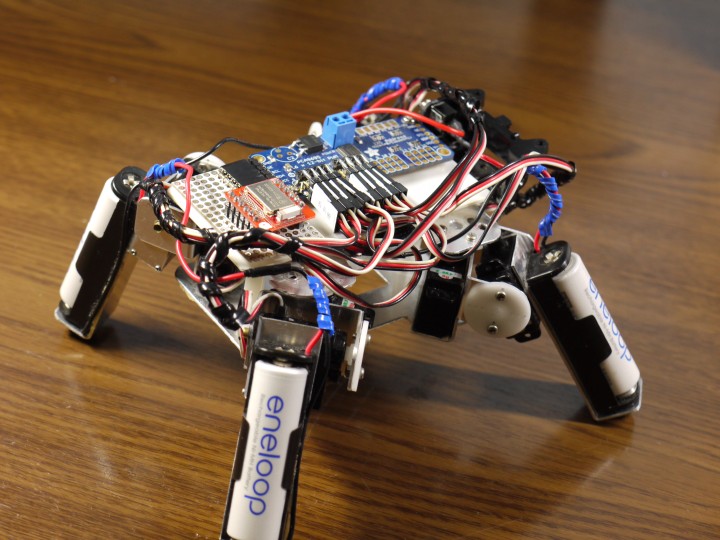
ミニ四駆ラジコン5号機は「ミニ四足」というコンセプトでいきます。
メカは5年ほど前に作ったPETロボのものを転用します。共立電子のプチロボを参考にして作ったメカです。ブラケットは自作ですが、サーボは当時のプチロボと同じものです。このサーボRB-001(EK2-0500)は、今では入手困難だけど、同じ形のEK2-0508なら今でも手に入りそうです。ただし、EK2-0508のほうが動きは速いけど、トルクはやや劣るらしいです。
(参考: King2 サーボ EK2-0508 - 気まぐれ飛行船 )
ボディーはアビリスタ。実車ぽいデザインのボディーと4足歩行のギャップを狙ったチョイスです。

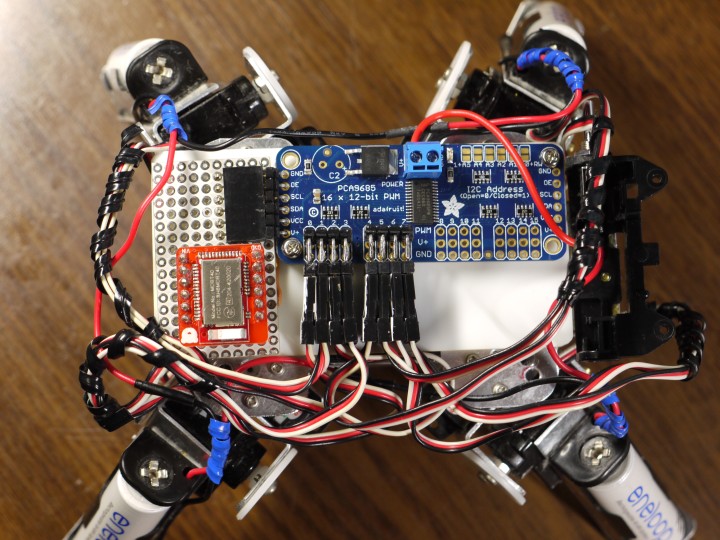
回路はとりあえずBLE Nano + PCA9685だけ。わりとスカスカです。
PCA9685はPWM発生器ICで、12ビットPWM×16チャンネルです。ラジコンサーボ用のブレイクアウトボードが市販されているので、使ってみることにしました。Arduino用のライブラリもあります。
スペースの都合でラジコンサーボのピンヘッダを横向きにしたかったのですが、3列L型のピンヘッダが在庫切れで入手できず、2列L型と1列L型、1列直型を組み合わせて使いました。
運ぶのにちょうど良い大きさのダンボール箱なのですが…やっぱりミニ四駆のポータブルピットに入れたほうがサマになるかな…
